Among the wearable devices, sensors are crucial, and the acceleration sensor can recognize the position and posture. This paper helps the reader to better understand the application of the acceleration sensor by analyzing the working principle of the three-axis sensor.
First, the working principle of the acceleration sensorThe acceleration sensor naturally detects the acceleration of its own device. The physical implementation of its own is not to be developed. It is conceivable that there is a vacuum region inside the chip, in which the sensing device is located, which causes a voltage change due to the inertial force and gives a quantized value through the internal ADC.
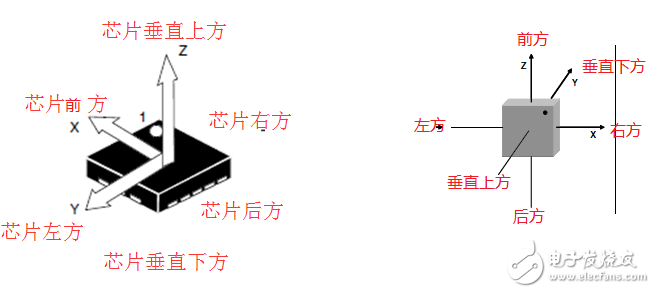
For the three-axis acceleration sensor, it can detect the acceleration data of X, Y, Z, as shown below:
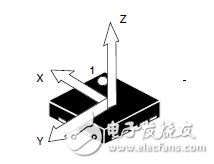
In the static state, the sensor must act in one direction of gravity, so the data of one axis is 1g (ie, 9.8 m / sec twice). In practical applications, we do not use the calculation method related to 9.8, but use 1g as the standard acceleration unit, or use 1/1000g, which is mg. Since it is an ADC conversion, there is definitely a concept of range and precision. In terms of range, Lis3dh supports (+-) 2g/4g/8g/16g. Generally, as a step-by-step application, 2 g is sufficient, and 1 g of acceleration can be detected by removing 1 g of gravitational acceleration. As for the precision, it is related to the number of registers used. Lis3dh uses two 8-bit (16-bit total) registers to access the current reading of an axis. Since there are accelerations in both directions, the 16-bit number is a signed integer and the actual value is 15 bits. Calculated by the (+-)2g range, the accuracy is 2g/2^15= 2000mg/32768 =0.061mg.
When the static state shown in the above figure, the positive direction of the z-axis will detect 1g, and the X and Y axes will be 0. If the position is adjusted (such as the screen of the mobile phone is flipped), there will always be one axis that will detect 1g, and the other axis will be 0. In the actual measured value, it may not be 0, but has a subtle value.
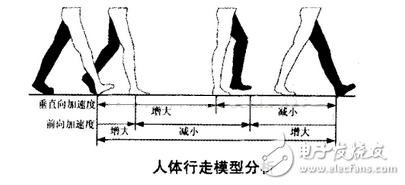
The x, y, and z axes change during the movement. The stepping movement also has its inherent numerical law, because the stepping process also has the regular process of lifting the foot and releasing the foot, as shown in the following figure. "The ankle is off the ground is the beginning of a step. At this time, due to the reaction force of the ground, the vertical acceleration begins to increase. When the foot reaches the highest position, the vertical acceleration reaches the maximum; then the foot moves downward and the vertical acceleration begins to decrease. Until the foot touches the ground, the vertical acceleration is reduced to the minimum. Then the next step is taken. The forward acceleration is generated by the friction between the foot and the ground, and the feet increase when they touch the ground, and decrease when the foot touches the ground.
1. Perform motion detection at rest
Use the OR circuit to work, set a small motion threshold, and only detect whether the X and Y axis data exceeds the threshold (the Z axis has 1g at this time, regardless of the axis). As long as the data of any axis of X, Y exceeds the threshold for a certain period of time, the device is considered to be in the wakeup state.
2. Weight loss detection
When the weight is lost, the Z-axis acceleration and the gravitational acceleration cancel, and will be 0 in a short time, and the X and Y axes do not change, so all three are 0 in a short time. Here, the AND circuit is used to set a small motion threshold. When the data in all three directions is less than the threshold for a certain period of time, it is considered to be weightless.
3. Position and posture recognition
Application scenarios such as cell phone flipping use this feature.
Weighing display is an instrument that displays the mass and weighing status of the weighed object in electronic instrument. Weighing display is originally analog indicator type, which consists of error amplifier, reversible motor, Balance Bridge, excitation power supply, Dial, Pointer and other parts, and works according to the principle of automatic balance electronic potentiometer. It has slow weighing speed, single function and low accuracy, and has been basically eliminated now. The current weighing display is digital display.
Weighing indicator ,Weighing indicator,Weight Force Indicator,Platform Scale Weighing Indicator,Digital weighing indicator,Weighing display
Ningbo Santwell Imp & Exp Co.,Ltd , https://www.santwell.com